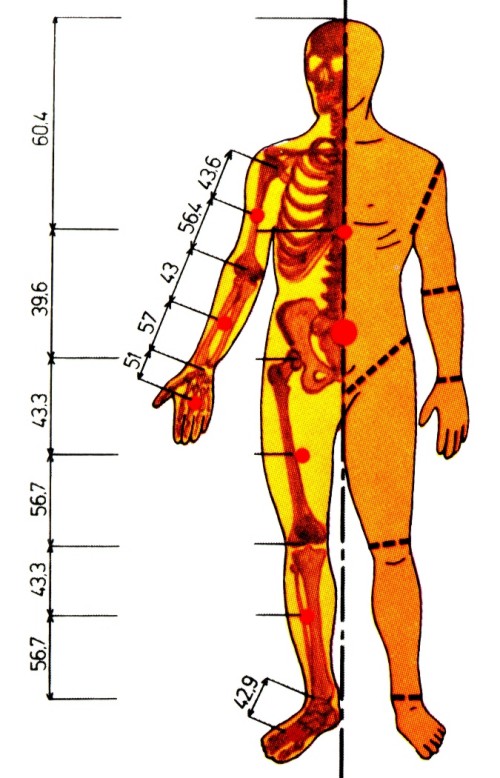
Segmenty těla jsou části lidského těla, které se vyznačují relativní samostatnou pohyblivostí a které tvoří strukturální základ pohybového aparátu člověka (Obr). Rozeznáváme jejich relativní hmotnost a její rozložení (hmotnost segmentů těla, těžiště segmentů těla,), tvar a vzájemnou vazbu (biokinematické dvojice)
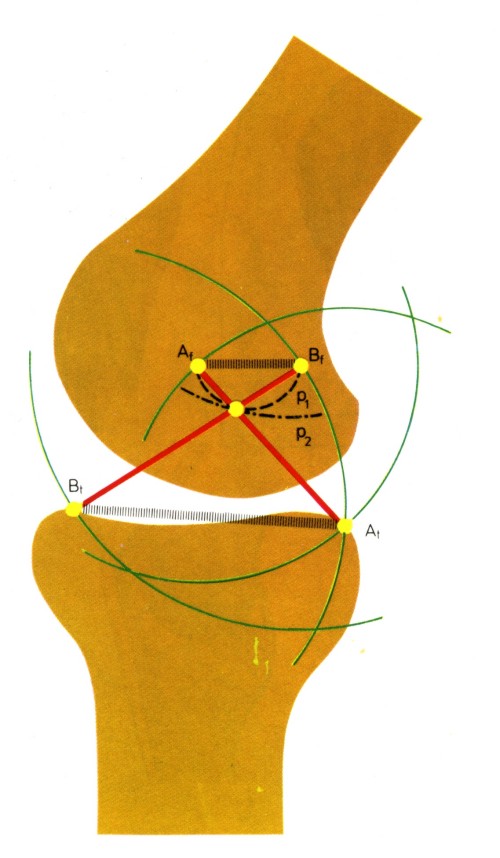
Biokinematické dvojice je mechanická náhrada vazebních podmínek a vztahů mezi vzájemně artikulujícími segmenty, které definují z hlediska kinematiky jejich vzájemnou pohyblivost (stupeň volnosti, charakter pohybu, atd.) na dané rozlišovací úrovni. Rozeznáváme tak např. elementární dvojici rotační (loketní kloub), sférickou (kyčelní a ramenní kloub), či komplikovanější biokinematické dvojice (Obr), které lépe reprezentují kinematiku reálného „anatomického“ kloubu ( viz např. vzájemně spřažená zdvojená rotačně-posuvná dvojice kolenního kloubu, jehož kinematiku je možné simulovat „zkříženým“ čtyřkloubovým mechanismem (Obr).
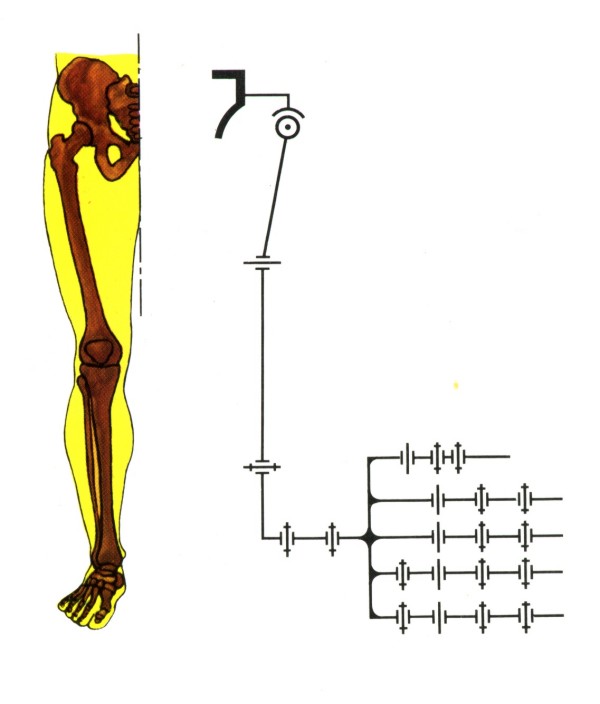
Biokinematický řetězec je soustava vzájemně artikulujících segmentů pohybového aparátu (Obr). které jsou v dané pohybové konfiguraci uspořádány v sekvenci, kdy této uspořádanosti odpovídá i sekvence relativních pohybů, které lze chápat hierarchicky jako sled pohybů unášivých a druhotných.
Antropomorfní mechanismus je náhradní mechanická soustava, která je tvořena hmotnými mechanickými členy vzájemně svázanými geometricky definovanými vazbami (kinematickými dvojicemi), která vhodně, na dané rozlišovací úrovni, simuluje tvar a hmotnostní geometrii těla, kinematickou a dynamickou charakteristiku vnitřních a vnějších vazeb pohybového aparátu člověka. Velmi populární je tzv. „stick“ model (Obr)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}